Optimization for (simulation) engineering
“Efficient Global Optimization of Expensive Black-Box Functions” Jones, Schonlau, Welch, Journal of Global Optimization, December 1998
Engineering objective: optimize $f$ function/simulator, with lowest $f$ evaluations as possible.
Basic idea
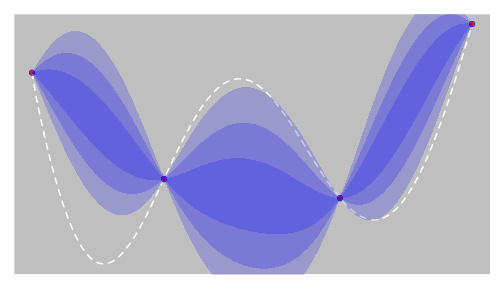
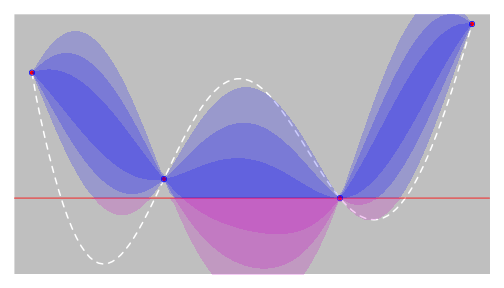
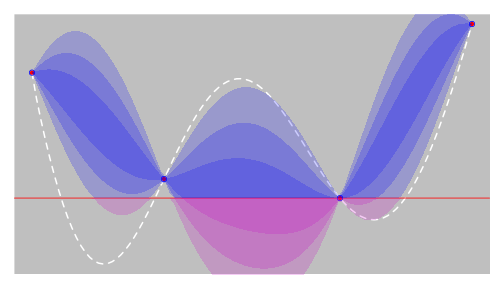
create some $\color{blue}{models\ of\ f}$ based on few evaluations $x={X}$
(simple) Kriging
- $m(x) = C(x)^T C(X)^{-1} f(X)$
- $s^2(x) = c(x) - C(x)^T C(X)^{-1} C(x)$
- $C$ is the covariance kernel $C(.) = C(X,.)$, $c(.) = C(x,.)$
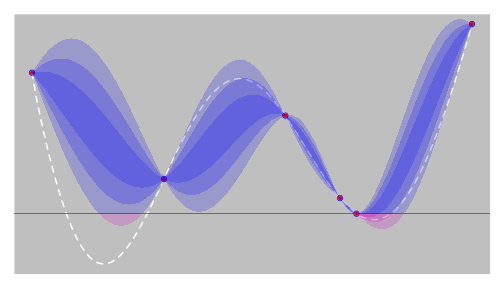
Efficient Global Optimization
</div>
Let’s define the Expected Improvement:
which is (also) analytical thanks to $M$ properties…
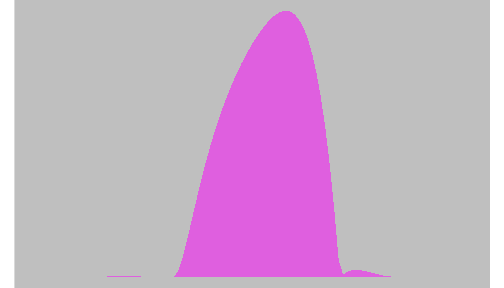
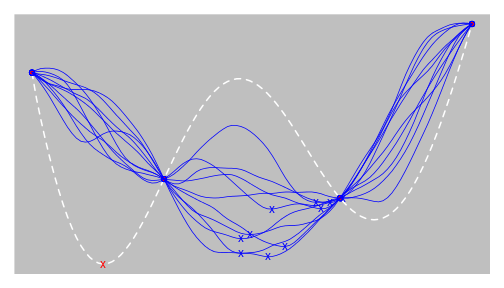
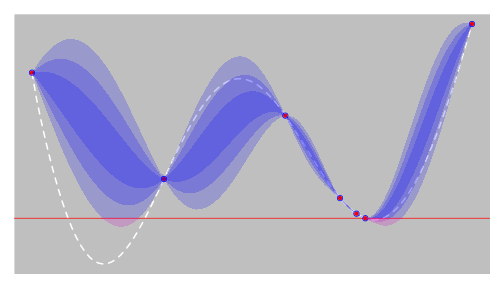
EGO: Maximize $EI(x)$ (*), compute $f$ there, add to $X$, … Repeat until …
- + good trade-off between exploration and exploitation
- + requires few evaluations of $f$
- - often lead to add close points to each others …
Which is not very comfortable for kriging numerical stability - - “one step lookahead” (myopic) strategy
- - rely on model suitability to $f$
(*) using standard optimization algorithm: BFGS, PSO, DiRect, …
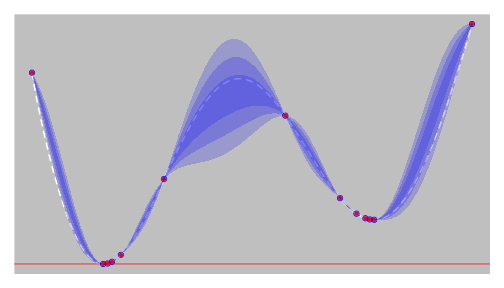
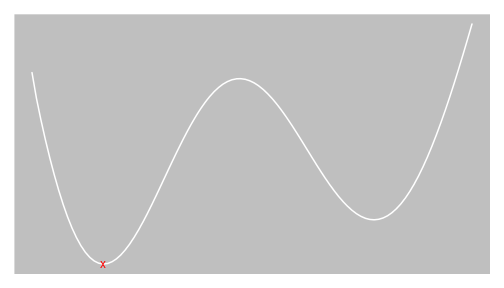
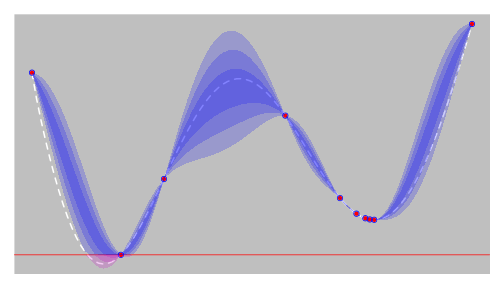
EGO - step 0

EGO - step 1
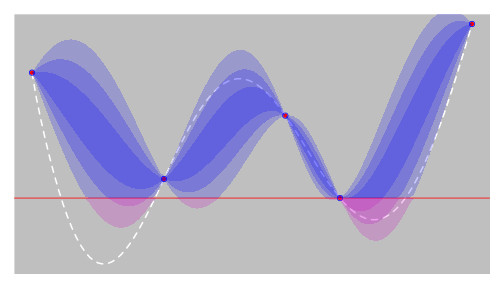

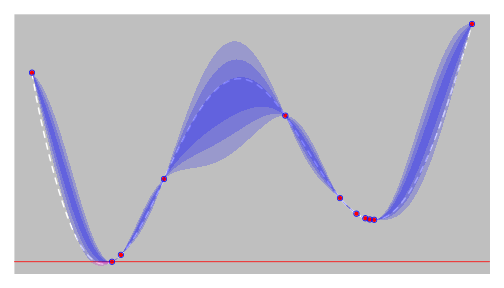
EGO - step 2

EGO - step 3

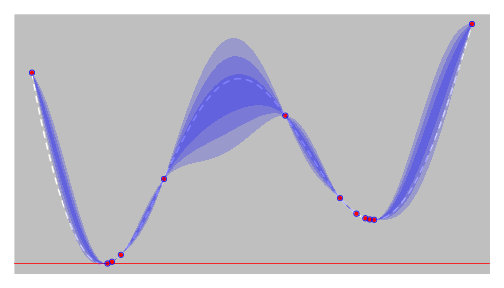
EGO - step 4
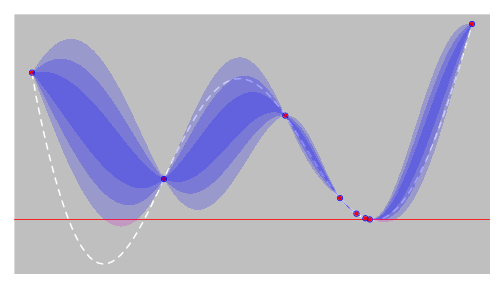

EGO - step 5
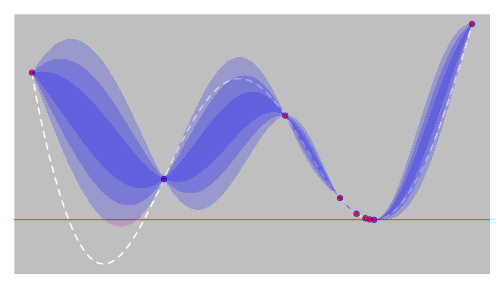

EGO - step 6

EGO - step 7

EGO - step 8

EGO - step 9